Introduction
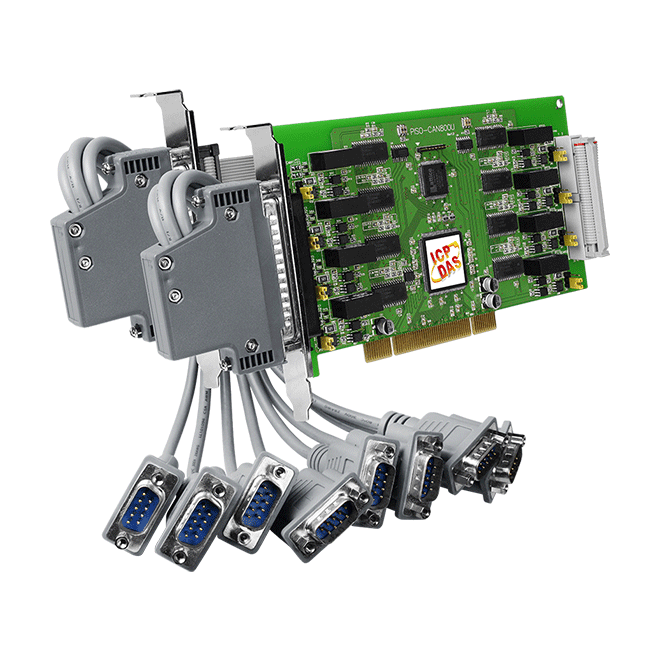
The CAN (Controller Area Network) is a serial communication protocol, and efficiently supports distributed real-time control with a very high level of security. It is an especially suit for networking "intelligent" devices as well as sensors and actuators within a system or sub-system. In CAN networks, there is no addressing of subscribers or stations in the conventional sense, but instead prioritized messages are transmitted. As standalone CAN controller, PISO-CAN800U-D can represent an economic solution of an active CAN board. It has eight independent CAN bus communication ports and has the ability to cover a wide range of CAN applications. Besides, PISO-CAN800U-D uses the new CAN controller Phillips SJA1000T and transceiver TJA1042, which provide bus arbitration, error detection with auto correction and re-transmission function. It can be installed in a 5V PCI slot and supported truly “Plug & play”.
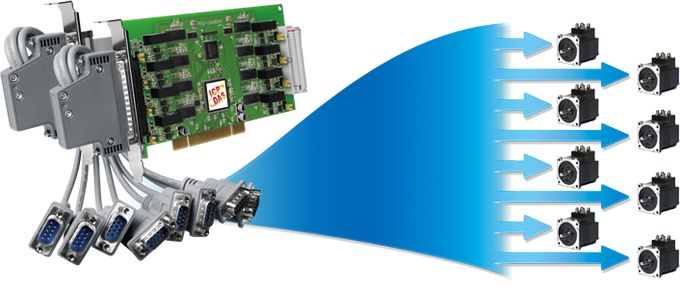
Applications

 فارسی
فارسی
 English
English